Panorama
全景照片之建置、處理與發佈
1.GE之三維藍圖及全景照片
Google併購專門開發並展示三維數位地球之Keyhole公司,將原本的Keyhole軟體改版為Google Earth (GE),其用意即為整合全世界包括衛星影像或航拍影像在內的許多圖資,透過三維展示或三維建模的方式營造一個虛擬地球(virtual earth)的平台,最終希望用戶能透過GE即有身臨全世界任一角落之體驗,此為Google Earth與Google Map或其他網際網路GIS最大不同的訴求點。為此,繼Keyhole之後,Google在2006年併購了專門開發3D繪圖軟體Sketchup的繪圖公司,使用戶可將3D模型建構在Google Earth平台上,緊接著,又推出街景服務(Street View),由Google派遣全景車或全景拍攝設備收集全世界主要城市街道的全景照片,將全景照片透過超級套疊技術(super overlay)整合進Google Earth,點選進入後即可開啟專用的看圖軟體(Google Viewer)取得當地全景。街景視圖雖然不是Google Earth達成虛擬地球目標的最後手段,但的確是邁向需擬地球的一大突破,因為自街景視圖後迄今,Google Earth在建構虛擬地球的藍圖上就沒有更新或更具代表性的突破。因此,可以整合進Google Earth的全景照片(panorama),堪稱為目前尺度最小(最接近實物)的空間資訊,也是在眾多空間資訊平台中GE獨有的圖資。
2.全景照片拍攝與製作
全景拍攝與網路3D展示或3D建模相比,並不是一項創新的技術,早在底片拍攝時代就有拼接數張相鄰拍攝具有重疊區域的照片而形成全景照的技術,以目前的光學及數位拼接技術,要以最少照片數製作無接縫、高畫質及色調一致的全景照片更非難事,因此開發可建構在GE上的街景視圖在技術上的關鍵主要在於取得全景的設備,及將高解析全景照片整合進GE後可快速發佈的超級套疊技術。取得全景照片的拍攝設備主要可分為以一次觸發多部相機系統及以一部相機多次環繞拍攝取得數張全景所需照片兩種。前述之GE全景車即為一次觸發多部相機系統,其多相機系統構造可將多部相機鏡頭以陣列方式排列於一個球體上,所有相機同時觸發一次即可取得具有重疊區域可供全景拼接之照片,其優點為可高速拍攝、快速產製大批全景照片及相片規格一致後處理容易、缺點為硬體設備價格高昂、且因設備重需放在機動車輛上、可以探索的區域通常以城市街道為主,若在鄉間道路上操作則需將設備換裝在三輪車上。
若仔細研究GE上目前可提供全景照片的範圍,也可發現一次觸發多部相機系統受到重量及載具之限制,所以可及之範圍都局限於街道,因此目前GE中的全景照片才會以街景主題來命名,稱為街景視圖(street view)。事實上,若要能達到虛擬地球的目標,全景照片應能推展到更多主題上,例如災害主題或具有風土人情特色之景物上,如此一來則必須突破設備重量及交通工具之限制,且需降低設備成本讓更多用可以自製全景照片上傳,在這種情況下,吾人則需考慮犧牲部分拍攝速度而以一部相機多次環繞拍攝的方式取得足夠拼接全景之照片。若以一般鏡頭而言,要以一部相機製作全景照片需在不同的俯角及仰角圓上都做360度環繞,即使靜止不動拍攝,也很可能當所有角度拍完的時候景物已非一致(風吹草動、人物走動、車輛經過),非常耗時耗力,且後製拼接也不容易。因此,要以一部相機環繞拍攝的方式取得足夠拼接全景之照片,通常都會採用廣角鏡頭或視野可達180度的魚眼鏡頭。理論上,採用視野180度的魚眼鏡頭只要在水平上前後各拍一張照片即可涵蓋全景中所需的景物,但因兩張照片無重疊區域,且魚眼照片邊緣扭曲十分顯著,在拼接上非常困難。若以四張在0度、90度、180度及270度拍攝之魚眼照片進行拼接,兩張相鄰的照片至少都有30%無重大變形(可控制變形)的重疊區域可供特徵匹配點選取,組成的全景照片當然品質較佳。值得注意的是,因魚眼鏡頭視野小及對焦距離短,且因進光量小,所需快門時間較長,要取得一組高品質的全景照片必需在拍攝條件上做多次嘗試,成本雖低但難度比一次觸發多部相機系統更為複雜。
除了魚眼鏡頭及必須拍攝足夠可供拼接的照片數量外,以一部相機環繞拍攝的方式還需準備可固定角度旋轉的雲台,此雲台可為裝設在腳架上供人力攜行的人工旋轉雲台,如果採用可放在車輛上的自動控制旋轉雲台,可以大幅節省拍攝全景照片所需時間。


3.全景照片網路資訊平台發佈
在全景拼接軟體方面,拼接全景/環景照的商業軟體主要有Panoweaver,PTGui及Stitcher Unlimited。這些商業軟體的主要核心技術是計算照片形變及尋找相鄰影像特徵點以作為拼接依據的演算法,主要演算法包括SIFT (Scale Invariant Feature Transform) Lowe(2004)及SURF (Speeded-Up Robust Feature)。實務上,當拍攝條件不差(水平旋轉、角度一致)這兩個演算法都可產製品質不錯的全景照片,而SURF的優點是速度較快;當拍攝條件不佳,拼接成功的全景照片則需輔以非線性最佳化演算法,相關方法很多可參考德國富特旺根大學(University of Applied Sciences Furtwangen) Dersch教授的網頁文章(http://webuser.hs-furtwangen.de/~dersch/)。
總結前述,茲彙整兩種拍攝全景照片方法之比較如下表,其中一次觸發多部相機以取得數張全景所需照片之技術即為GE目前已經相當成熟的技術,而再經本團隊多次嘗試後,也已經充分掌握以一部加了魚眼鏡頭的相機快速環繞拍攝以製作高解析度全景照片的技術,所製作之全景照片解析度可達9000×4500以上,以土石流災害主題所拍攝之成果範例,解析度不僅足夠在GE上發佈不失真的全景照片,甚至可以大圖輸出製成海報。
| 比較項目 | 一次觸發多部相機以取得數張全景所需照片 | 一部相機多次環繞拍攝以取得數張全景所需照片 |
| 設備成本 | 高 | 低 |
| 載具 | 機動車輛 | 不限 |
| 拍攝速度 | 快 | 慢 |
| 設備重量 | 重 | 輕 |
| 高畫質全景照片製作 | 可 | 可 |
| 後處理及拼接技術 | 容易 | 困難 |
| 大量產置 | 容易 | 困難 |
| 設備普及度 | 低 | 高 |
| 拍攝主題 | 街道 | 不限 |
| 本團隊技術掌握度 | 成熟 | 成熟 |
| 設備代表範例 | GE全景車 | 一部數位相機+魚眼鏡頭 |
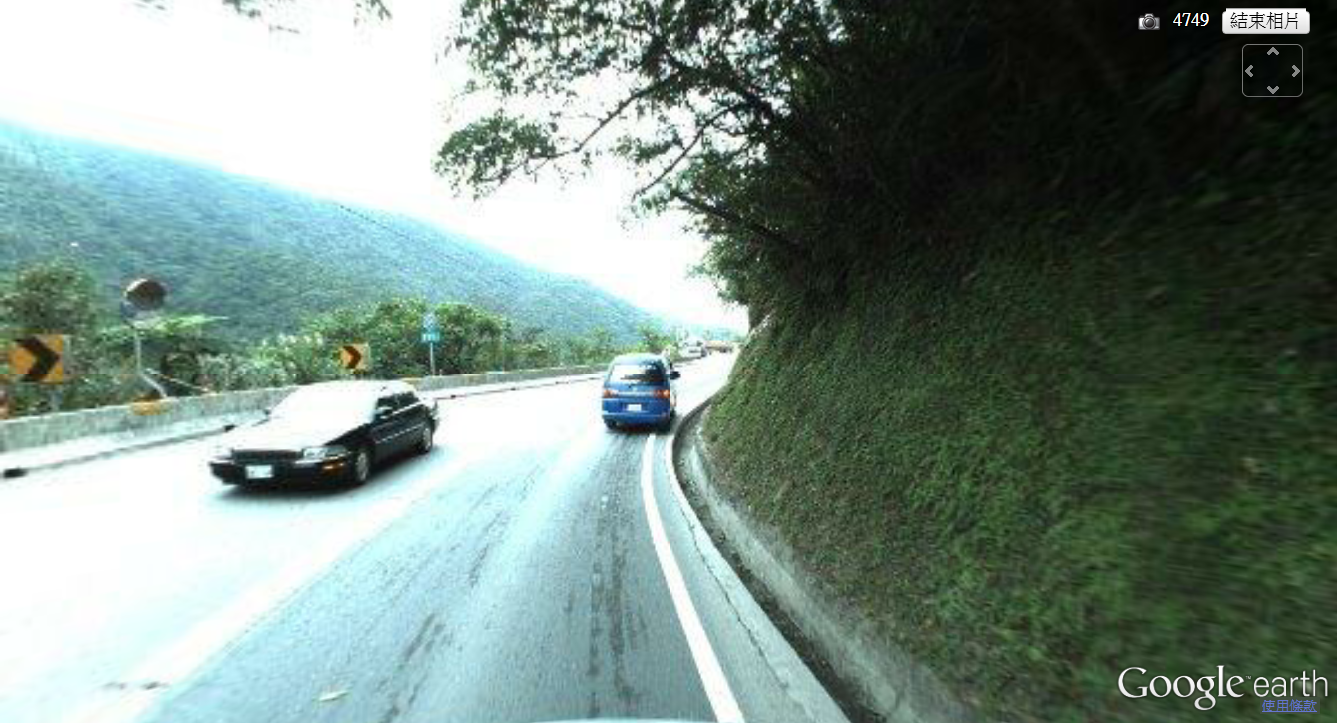
4.全景照片成果範例
|
||||||||||||||||
|